研究Studies
ファジィ制御
- Kazuo Tanaka, “Significant Contributions and the Achivements in Fuzzy Control”, in Envisioning the Future: Continuing the Legacy of Professor Michio Sugeno, Panel discussion at WCCI 2024, The IEEE World Congress on Computational Intelligence, Yokohama, Japan, June 30, 2024 なお、「Takagi-Sugeno fuzzy model」という名称は、田中先生が命名され、学会や論文で最初に使用なさったことで世界的に定着したものです。
- = INDEX =
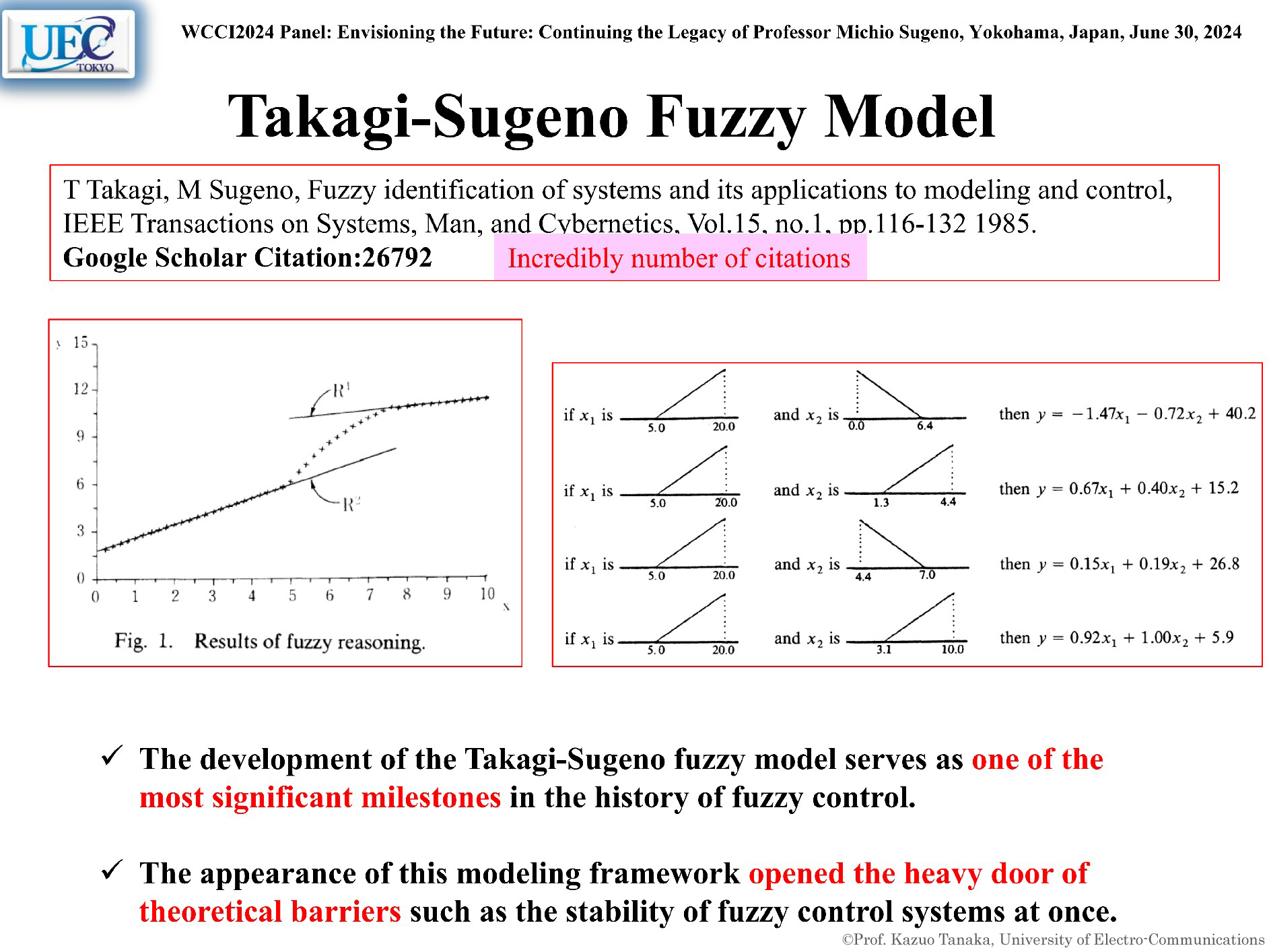
Takagi-Sugeno モデル
This new model is suitable for the representation, analysis, and control of nonlinear systems.
... This series of studies is being conducted by young and talented researchers.
模型自動車のファジィ制御
東京工業大学菅野研究室では、音声でおおまかに指示を与えるだけで自由自在に走る模型自動車を試作し、直進、右折や左折、バックでの車庫入れなど一連の動作を実現した。車が走るべき中心線からの距離、車の向きなどの現在の状態を超音波センサで計測し、ファジィアルゴリズム制御を用いて速度の調整やハンドルを切る角度・タイミングなどを決定する。
たとえば「交差点を右折」と音声で命令すると、「交差点に近づいたら徐々に減速し、しばらくしたらハンドルを切り始める」といった人間の曖昧さを含む判断を、操縦命令に変換して無線送信し、走行をコントロールする。
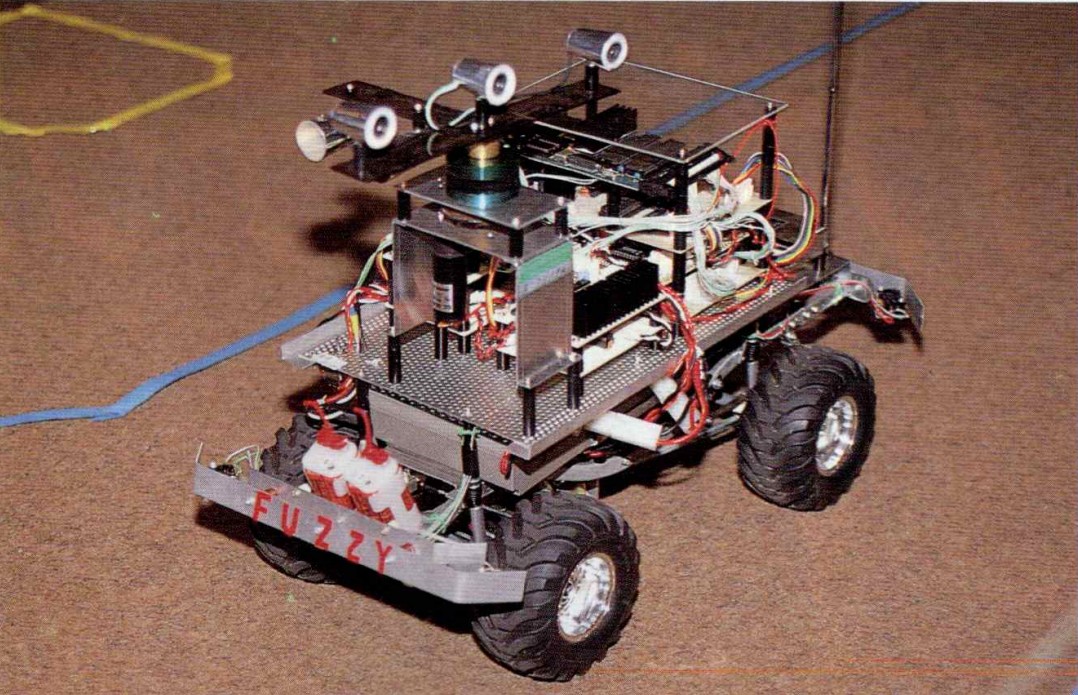
オペレータの口頭指示は、音声認識装置を経てパソコンに送られる。パソコンで指示が解釈されると、とるべき動作がファジィアルゴリズムに従って順番に決定され、動作に関する信号が、ワイヤレスモデムを通じてパソコンから車に送られる。 音声認識装置はリコー(株)製で、こちらもファジィ理論を応用したものである。 車には、速度、ステアリング角およびセンサを制御するオンボード・マイコンが装備されている。センサからの情報は、車からパソコンへワイヤレスモデムを通じて送られる。
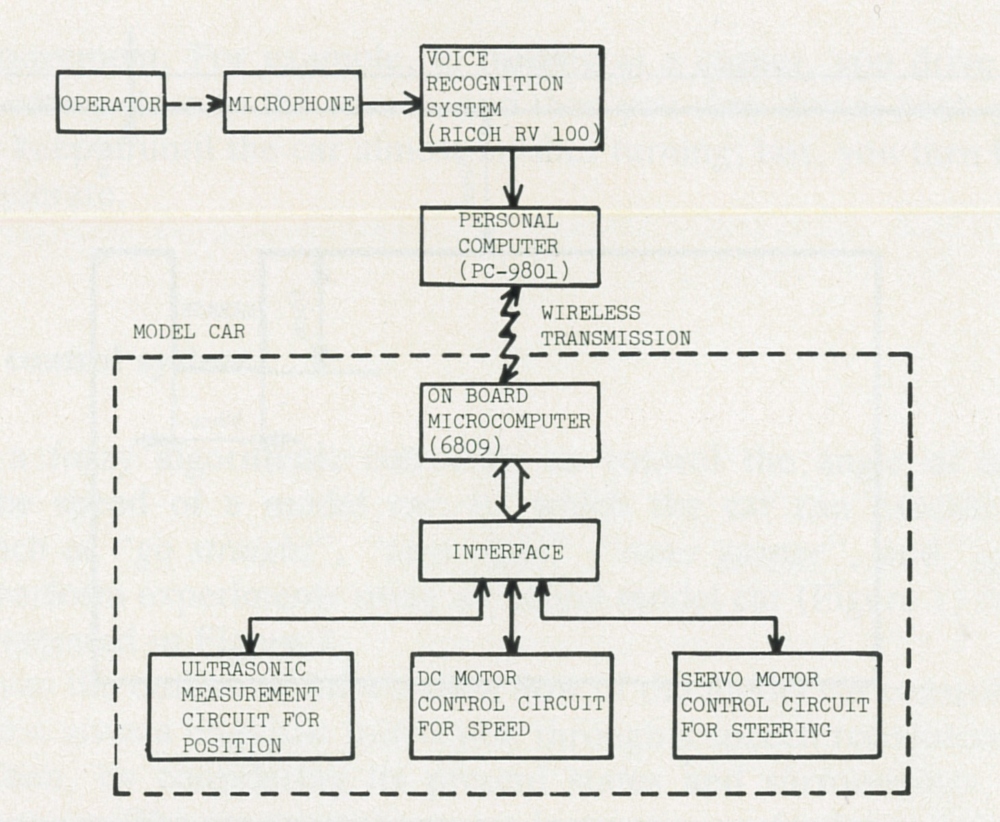
システムが受け付ける口頭指示にはマクロ指示とミクロ指示がある。
・マクロ指示:「直進」、「右折」、「車庫入れ」、「出ろ」(車庫から出ろ)
・ミクロ指示:「走れ」、「下がれ」、「止まれ」、「速く」、「遅く」、「右」(ハンドルを右に切れ)、「左」(ハンドルを左に切れ)、「戻せ」(ハンドルを戻せ)、「センサ固定」
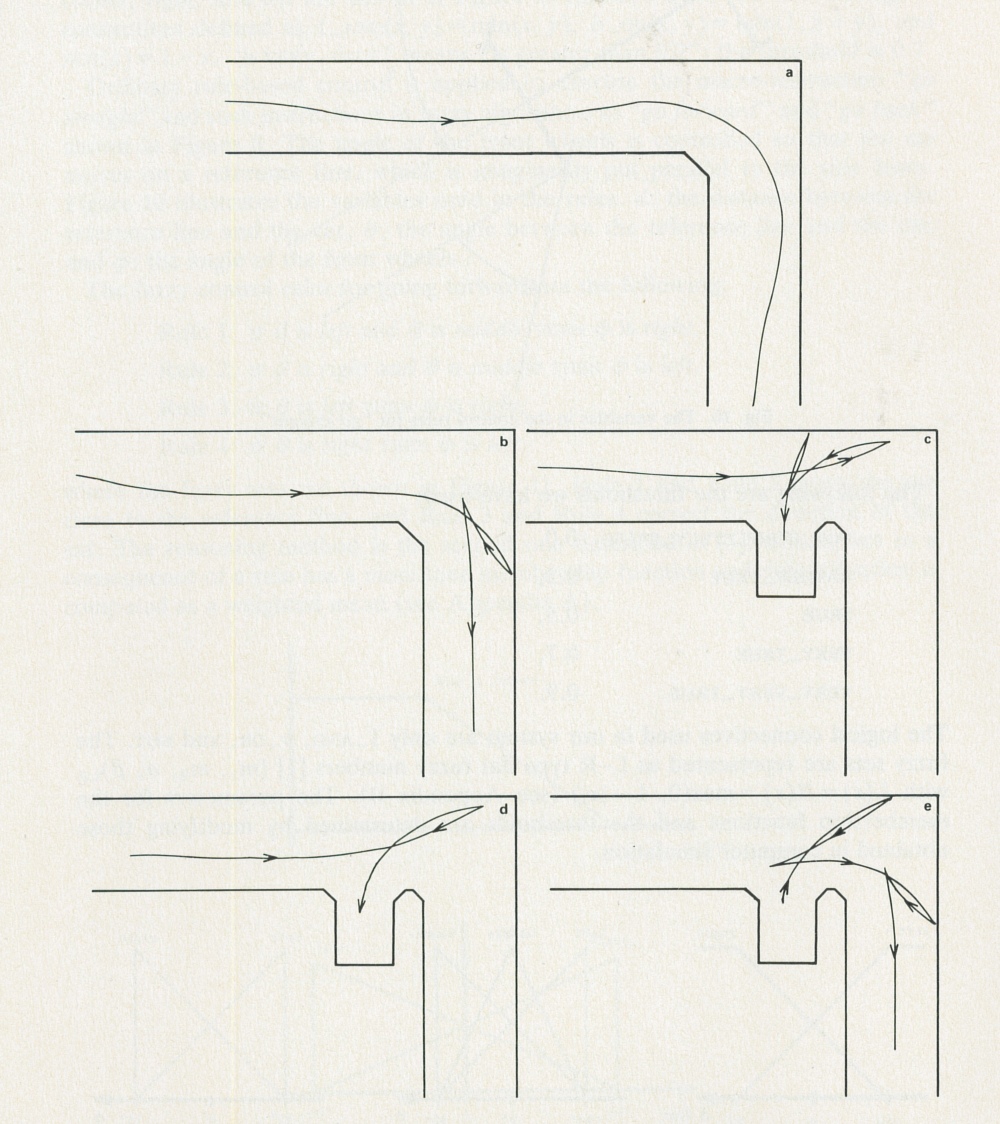
マクロ指示「右折」のファジィアルゴリズムは、『車は角に近づくまで直進し、角の近くで速度を落とし、ハンドルを切る地点までさらに前進、ハンドルを切り、80%ほど曲がりきるまでそれを保持、マクロ動作「直進」にはいる』といった具合である。
さらに、接続詞「そして」によって、例えば『直進、そして、右折、そして、車庫入れ』のように、マクロ指示をつなぐことができる。
マクロ指示による走行の軌跡の例を図3に示す。
参考文献
- [1]
- 室伏俊明、菅野道夫, "模型自動車のファジィ制御", 日本ロボット学会誌, Vol.6, No.6, pp.536-541, 1988.
- [2]
- "応用広がるファジー理論 東京で開かれた国際学会から", 『朝日新聞』 1987年7月31日付夕刊, 第2面, 1987.7
著作・口頭発表
- [1]
- 西田真佐子、菅野道夫, "模型自動車のあいまい制御", 第1回知識工学シンポジウム資料, pp.143-148, 1983.日本語
- [3]
- Michio SUGENO and Kazuyuki MURAKAMI, "An experimental study on fuzzy parking control using a model car", in: Industrial Applications of Fuzzy Control, M. Sugeno eds., Elsevier Science Publishers B.V., pp.125-138, 1985.英語参考
- [5]
- 菅野道夫、片山敬一, "マクロ指示による模型自動車の制御", 第11回システムシンポジウム講演論文集, pp.313-316, 1985.日本語
- [7]
- Michio SUGENO, Toshiaki MUROFUSHI, Tsutomu MORI, Takeshi TATEMATSU and Jun TANAKA, "Fuzzy algorithmic control of a model car by oral instructions", Preprint of 2nd Int. Fuzzy Systems Association World Congress (IFSA'87), Tokyo, Japan, vol.2, pp.817-820, 1987.英語参考
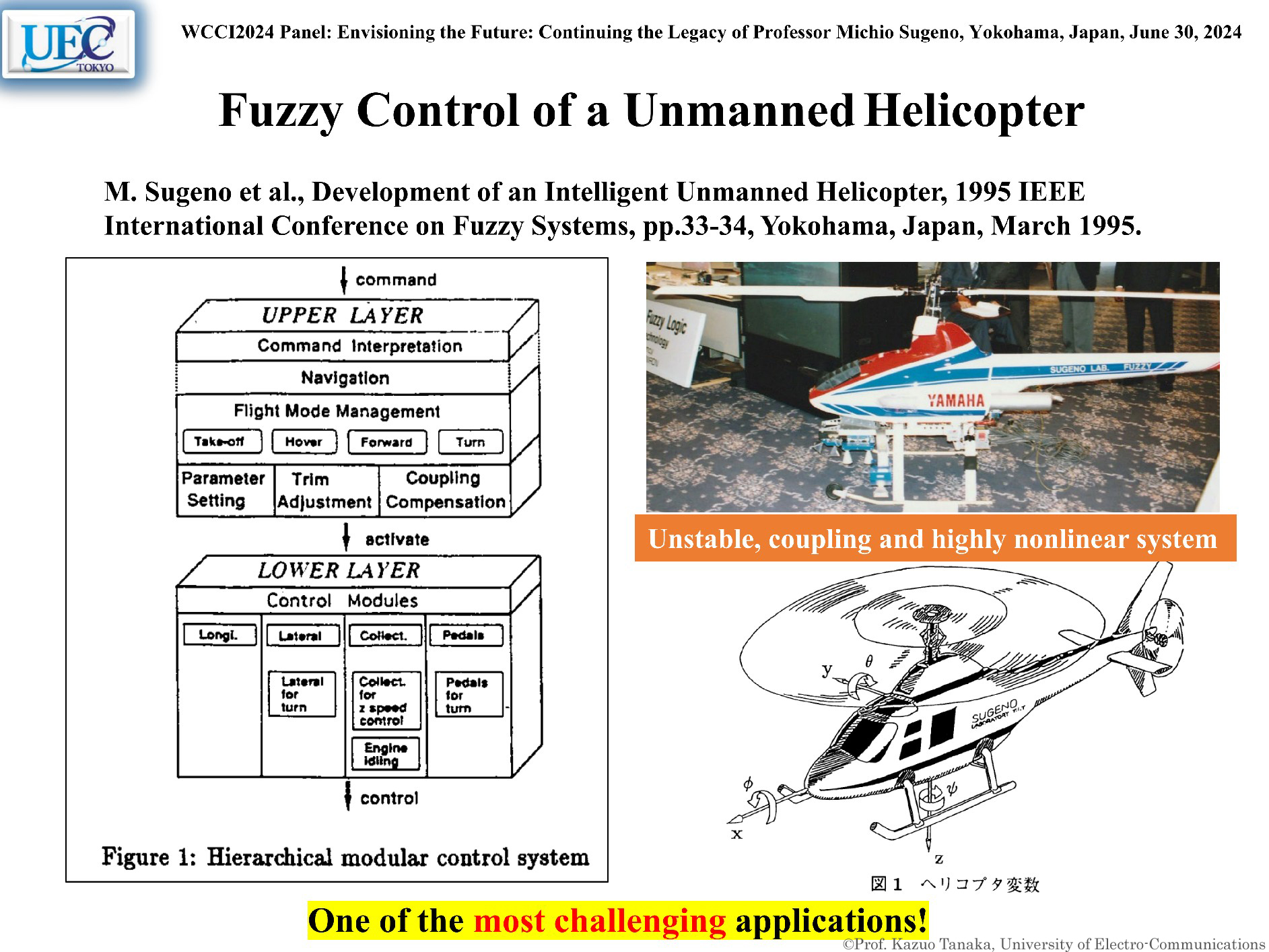
知的無人ヘリコプタ

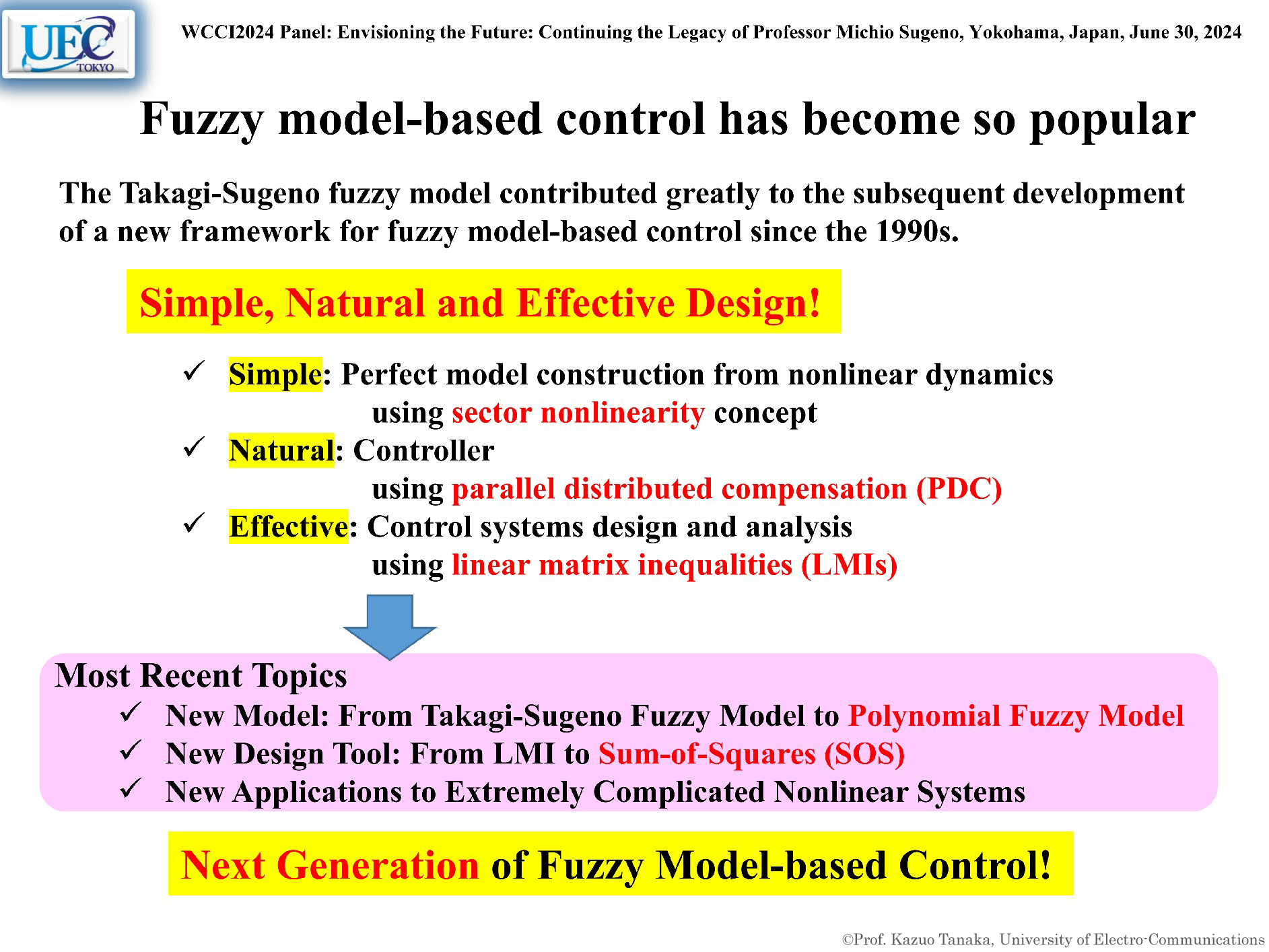
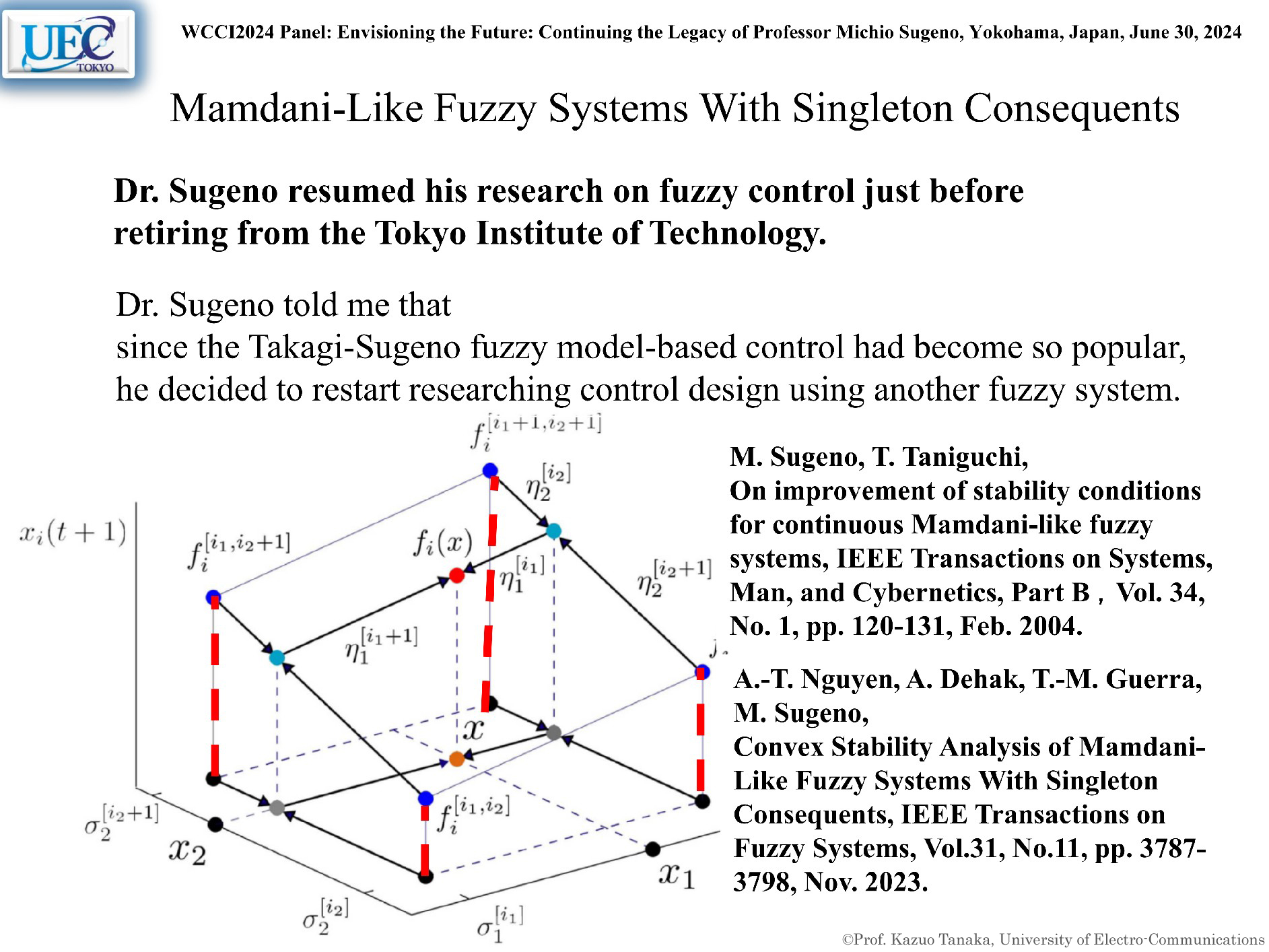
TSモデルの進化形
区分的多重線形モデル(Piecewise Multi-Linear (PML) Models)
著作・口頭発表
- [5]
- Osamu YAGISHITA, Osamu ITOH and Michio SUGENO, "Application of fuzzy reasoning to the water purification process", in: Industrial Applications of Fuzzy Control, M. Sugeno eds., Elsevier Science Publishers B.V., pp.19-39, 1985.英語参考
- [6]
- Tsukasa YAMAZAKI and Michio SUGENO, "A microprocessor based fuzzy controller for industrial purposes", in: Industrial Applications of Fuzzy Control, M. Sugeno eds., Elsevier Science Publishers B.V., pp.231-239, 1985.英語参考
- [12]
- Kazuo TANAKA and Michio SUGENO, "Stability analysis of fuzzy systems using Lyapunov's direct method", Proc. of NAFIPS'90, Toronto, Canada, pp.133-136, 1990.英語参考
- [13]
- Michio SUGENO and Takahiro YASUKAWA, "Linguistic modeling based on numerical data", Proc. of 4th Int. Fuzzy Systems Association World Congress (IFSA'91), Brussel, Belgium, pp.264-267, 1991.英語参考
