研究Studies
ここでは、東京工業大学菅野研究室で1988年~2000年の約10年間にわたり開発した知的無人ヘリコプタの概要を紹介する。
このヘリコプタはファジィ制御技術を用いて熟練者の操縦技術や知識をコンピュータに組み込み、離陸、前進、旋回、上昇などの言語指示を地上から送信して、音声誘導により飛行を制御する。
1994年1月、1995年2月の2度にわたり、向笠飛行場(静岡)にて公開実験を行い成功を収めた。地上からの言語コマンドで無人で飛行するヘリコプタとしては世界初であった。
このページでは、1995年時点の成果を中心としつつ、2000年までに行われた技術改良についてもあわせて紹介する。
ヤマハ発動機(株)製 無人ヘリコプタ R50
全長3.57m、重量44kg、ペイロード20kg
開発当時、主に日本国内で農薬散布等に幅広く用いられていたシングルロータ系の機種である。この機体をベースに、以下に記述するコントローラ、諸センサ、計測データ伝送用テレメータ、CCDカメラがインストールされている(図1)。

なお、1999年にはヤマハ発動機(株)製の新機種「RMAX」に変更している。
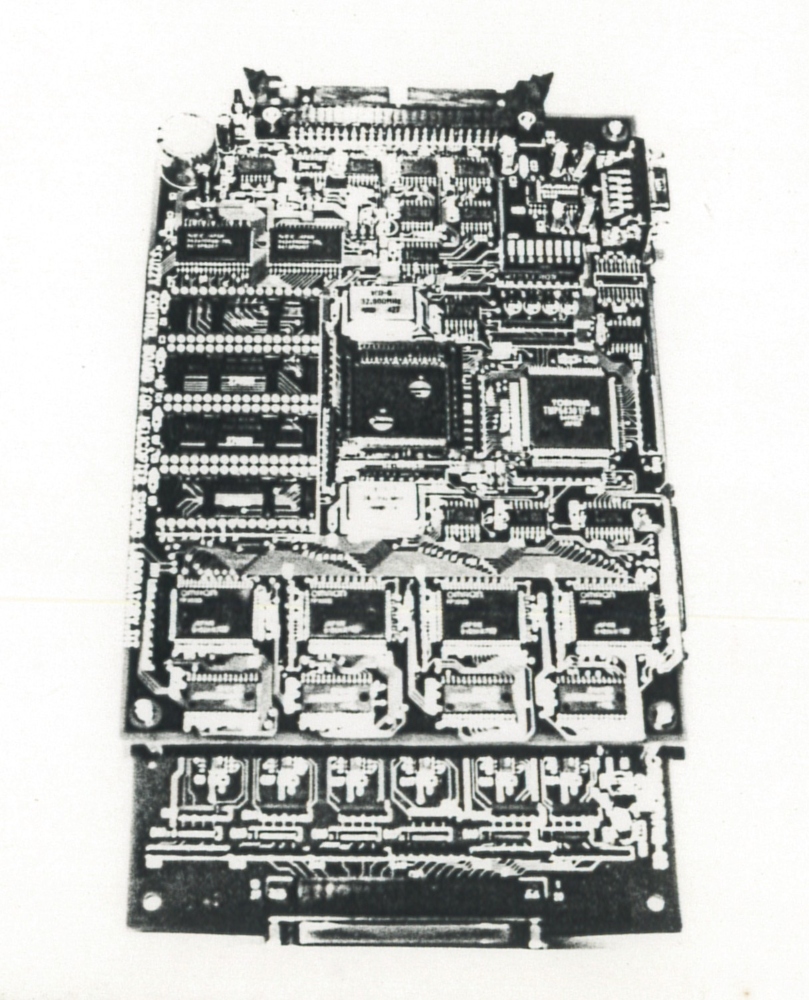
菅野研究室ではオン・ボード・ファジィコントローラを設計した(図2)。ファジィ推論チップが搭載されており、最大1500個のファジィ制御ルールを記憶し、最大256種類の飛行指令を受け付けることができる。 このコントローラには階層型ファジィ制御システムのソフトウェアがインストールされ、接続されている受信器により、地上からの飛行指令を受け取り、解釈してアクチュエータを駆動する構造になっている。
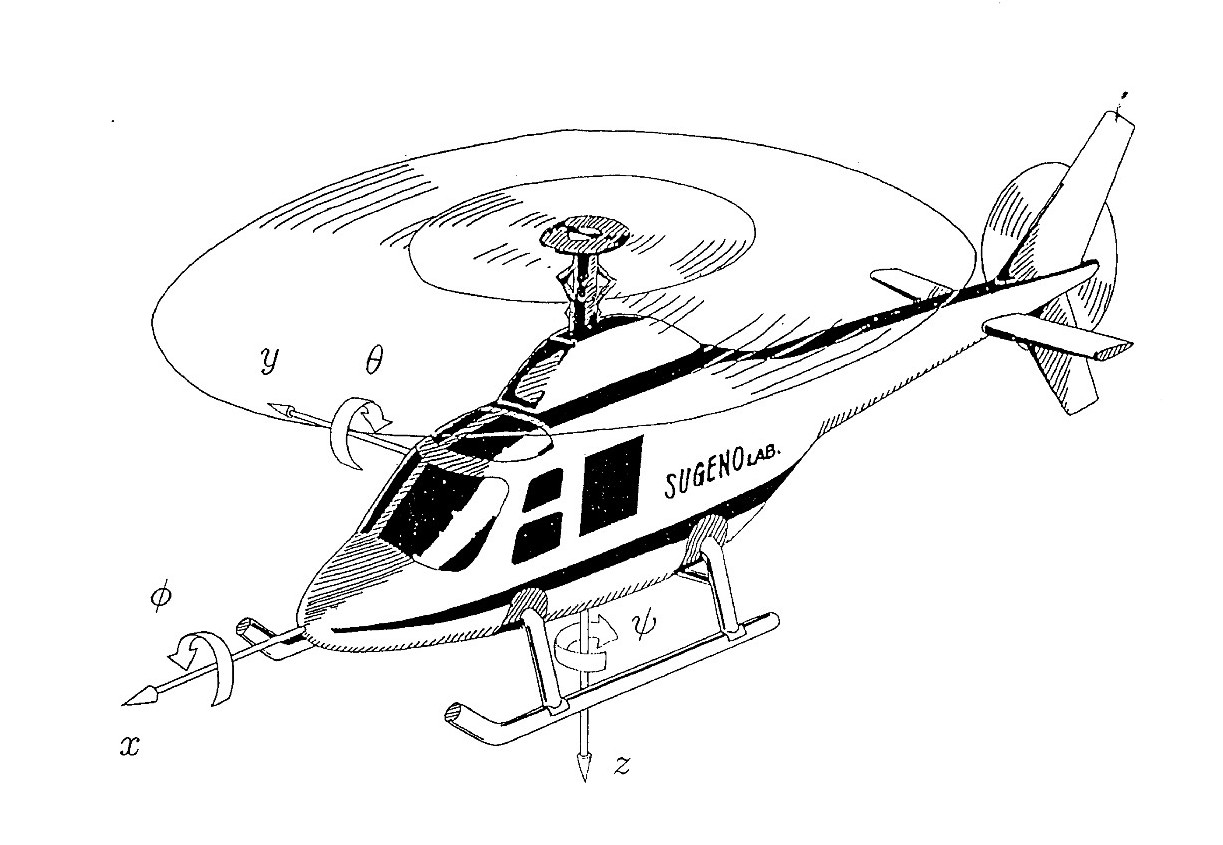
ヘリコプタは一般に、6つの自由度(3次元空間のX, Y, Z軸に沿った直線運動と軸回りの回転)と15個の状態変数(3次元の加速度、速度、位置及び機体のピッチ角(\(\,\theta\,\))、ロール角(\(\,\phi\,\))、ヨー角(\(\,\psi\,\))とそれらの角速度)をもつ(図3)。開発したヘリコプタはこれら15の変数すべてを計測できるセンサを備える。
主な搭載センサは
・TMOS 1000:光ジャイロを搭載したセンサシステムで、3次元加速度、姿勢角、姿勢角加速度を計測する。
・ドップラー速度計
・レーザー高度計
・磁気方位計:方位角を計測する。
・ディファレンシャルGPS:3次元の位置・速度を計測する。ディファレンシャルGPSは地上にもGPSを置いて補正することで計測精度が高まる。
センサによる計測データを地上に無線送信し、地上のデータレコーダに記録する。
CCDカメラによる映像を無線で機体から地上に送信しモニターする。カメラの向きはサーボモータにより、左⇔右、前⇔下と、リモートコントロールできるようになっている。この画像データは着陸や障害物回避などの飛行に使うと共に、これをモニターし、地上から飛行指令を送るために使う。
パソコン、音声認識装置、無線送信器からなる。言語コマンドは、マイク(音声)またはキーボードのいずれかで送信できる。
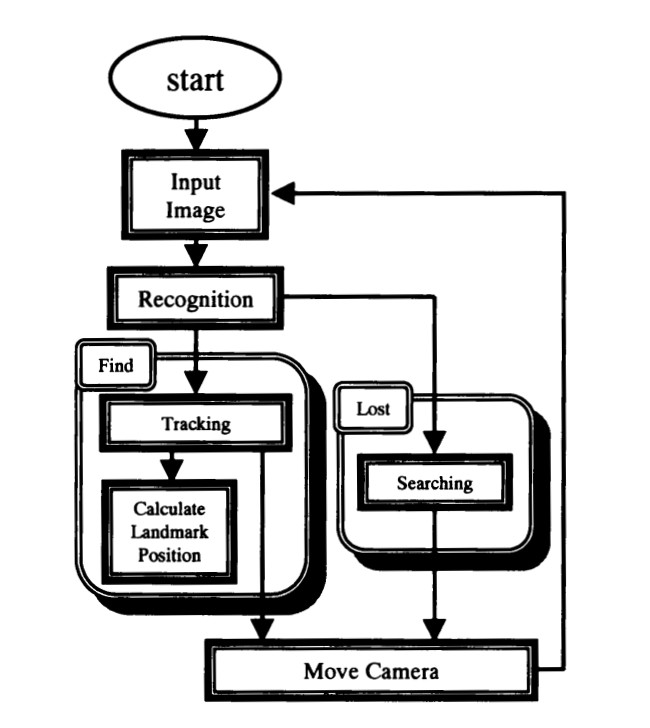
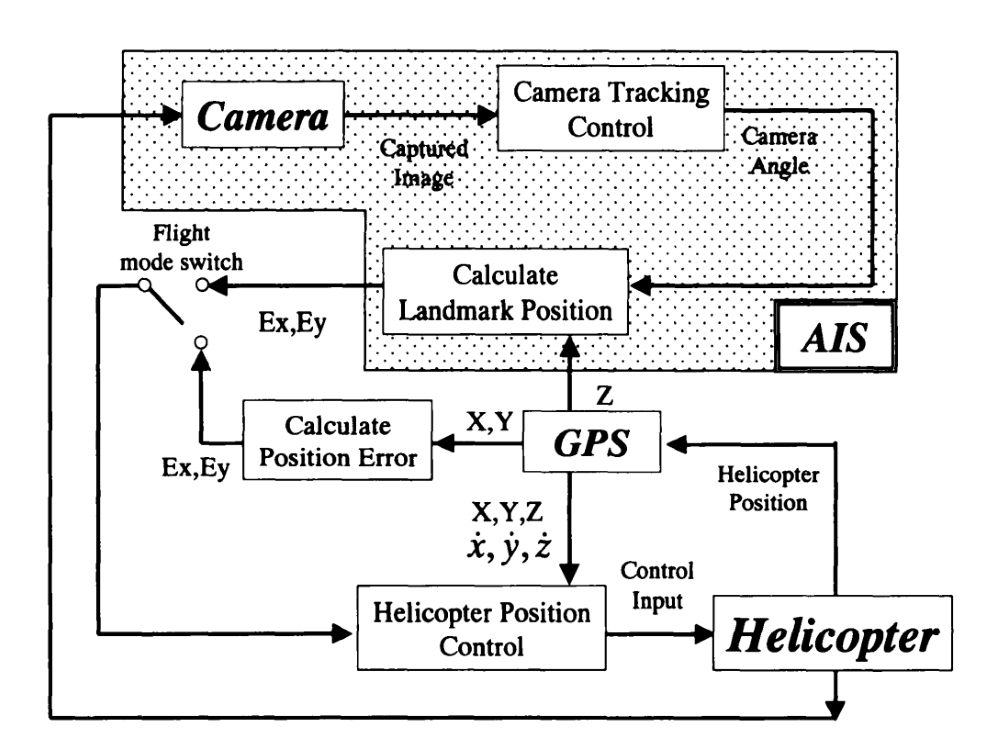
CCDカメラからの画像情報をもとに、目標物の位置を測定するシステムを開発した。目標物を自動追従するカメラの角度と機体の姿勢角、機体の高度情報からランドマークの位置を計算する。また、CCDカメラで移動物体を追従することで、移動物体の距離と相対速度を測定できる。
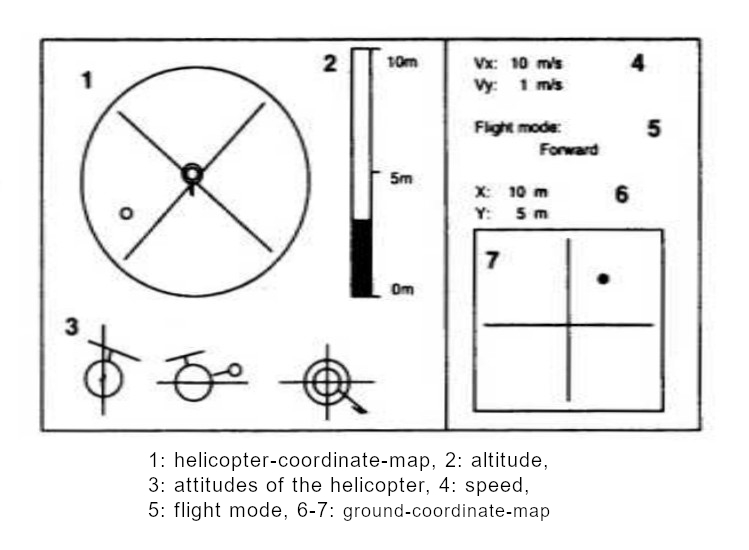
ヘリコプタおよび経由点、目標地点などの位置座標、姿勢角、地上座標上の軌跡、高度・速度・飛行モードなどをモニタに表示する。
菅野研究室では階層型制御ソフトウェア(図6)を開発した。
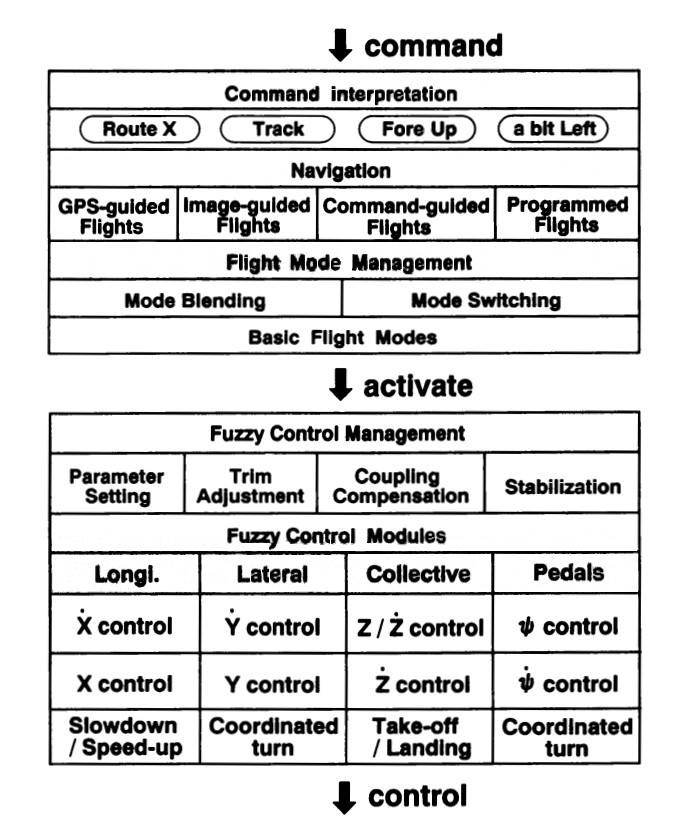
ソフトウェアは上位層と下位層からなり、下位層は以下の4つの入力を操作するためのモジュール型ファジィコントローラである。
1) Longitudinal cyclic pitch
2) Lateral cyclic pitch
3) Collective pitch
4) Anti-torque pedals
ファジィ制御モジュールには Longitudinal module、Lateral module、Collective module、Pedals (rudder) module の4種類がある。 各モジュールは if-then型の複数個のファジィ制御ルールにより構成されており、1つの飛行モードにおよそ60個のルールが用いられる。同じ入力についても定常状態と過渡状態では制御方法が異なるため、異なる制御モジュールが用意されている。 例えば x方向速度制御に用いる Longitudinal Module (図7) はvelocity制御とpitch制御に関してそれぞれ25、合計50個のルールからなっている。
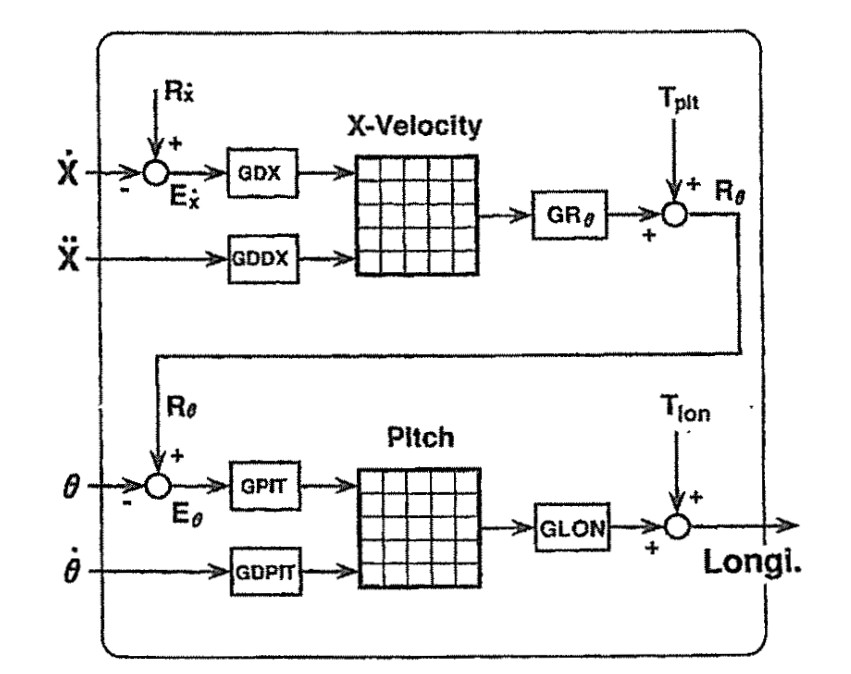
上記モジュールのファジィルールの一部を以下に示す。前件部の言語変数(PB、PS、ZOなど)はファジィ変数であり、対して後件部のそれはシングルトンである。
PB:positive big, PS:positive small, ZO:zero, . . . . .
下位層には以下の機能をもつ Fuzzy Control Management モジュールが備わり、より安定した飛行を可能とする。
・Parameter Setting:飛行モードごとにコントローラが必要とする速度、姿勢角等の目標値や各種ゲイン定数等を自動的に決定する。
・Trim Adjustment:パイロットが行うようにフィードフォワード的に操作量に加える定数値を自動的に決定する。
・Coupling Compensation:飛行モードごとに異なる変数間干渉を自動的に補正するよう、コントローラに指示する。
・Stabilization:風外乱への対処や、機体の異常振動の抑制制御を担う。
上位層は下位層を管理するもので、以下の3つのモジュールで構成される。
・Command Interpretation:「ルートAに沿って飛べ」「もっと速く」「大きく右に旋回」などの飛行指令の意味を解釈し、Flight Mode Management に伝える。
・Navigation:目標地点を与えられたとき、GPS情報、画像情報、及びあらかじめ与えたプログラムに従って飛行環境を考慮した最適な飛行ルートを自動的に決定する。
・Flight Mode Management:与えられた飛行目的に照らして一連の飛行モードを選択し、それらの飛行モードを順になめらかに実現する制御モジュールを選択して下位のコントローラを駆動する。
このヘリコプタの特徴は、
(1) 操縦のための複雑な4, 5個の操作を1つ(言葉の指示だけ)にまとめたこと。
これは最大の特徴であり、最大256個の言語コマンドが利用可能で、マニューバ(アクロバット飛行)以外のほとんどすべての飛行モードをコマンドだけで制御できる。
(2) 操作者はヘリコプタの飛行力学的特性を一切気にする必要がないこと。
(3) 音声による飛行指示ができる。
(4) GPS信号や画像情報を用いた高度な誘導飛行ができる。
主な飛行モードは、
(1) 基本モード:離陸、着陸、ホバリング、ホバリング左回転、ホバリング右回転、急停止、前進、後進、左進、右進、上昇、下降、左旋回、右旋回、など14個のモード。 「少し前進」「もっと速く」などのあいまいなコマンドを使うファジィモードも可能。
(2) 複合モード:「右斜め前進」「旋回上昇」「前進上昇」などの、基本モードを組み合わせたモード。
(3) ナビゲーションモード:GPS信号により、目的地へ自律飛行する。
(4) 画像飛行モード:CCDカメラを用いて、指定された着陸点を自動で発見し、着陸地点へ飛行して着陸する。
これらの組み合わせにより、以下の飛行実験に成功している。
移動物体の追従制御
移動物体に自動追従する機上カメラの角度から、物体とヘリコプタの相対関係を求め、その値をヘリコプタの位置制御に利用することで、移動物体をトラッキングする。
GPSと画像情報による自律飛行
ヘリコプタは目的地付近まではGPSのナビゲーションで飛行し、着陸地点の探索と位置特定にはCCDカメラを利用して自動着陸する。誤差1m以内の位置精度で着陸を実現している。
参考文献
- [1]
- 菅野道夫, "言語による複雑なシステムの制御~半自律無人ヘリコプタ~", in:『ファジィ思考による知的情報処理』 国際ファジィ工学研究所(編), コンピューターエージ社, pp.465-483, 1995.
- [2]
- 菅野道夫, "知的無人ヘリコプタ", 蔵前工業会誌 Kuramae Journal, No.909, pp.16-21, 1995.
- [3]
- Michio SUGENO, "Development of an intelligent unmanned helicopter", in: Fuzzy Modeling and Control: Selected Works of M. Sugeno, H. T. Nguyen and N. R. Prasad eds., CRC Press, Inc., pp.13-43, 1999.
- [4]
- 中村心哉、片岡顕二、菅野道夫, "アクティブビジョンとGPSを用いた無人ヘリコプタの自動着陸に関する研究", 日本ロボット学会誌, Vol.18, No.2, pp.252-260, 2000.
- [5]
- 菅野道夫, "実用化目指す空中ロボット-無人ヘリコプタ-", 日本ロボット学会誌, Vol.18, No.7, pp.937-940, 2000.
著作・口頭発表
- [4]
- Michio SUGENO, Toshiaki MUROFUSHI, Junji NISHINO and Hideaki MIWA, "Helicopter flight control based on fuzzy logic", Proc. of 1st Int. Fuzzy Engineering Symposium (IFES'91), Yokohama, Japan, Vol.2, pp.1120-1121, 1991.英語参考
- [7]
- Michio SUGENO, "Fuzzy Control of an Unmanned Helicopter", 2nd IEEE Int. Conf. on Fuzzy Systems (FUZZ-IEEE'93), San Francisco, USA, 1993. (Plenary Talk)英語
- [9]
- Michio SUGENO, Mike F. GRIFFIN and Andreas BASTIAN, "Fuzzy hierarchical control of an unmanned helicopter", Proc. of 5th Int. Fuzzy Systems Association World Congress (IFSA'93), Seoul, Korea, pp.179-182, 1993.英語参考
- [10]
- Michio SUGENO and Gyei-Kark PARK, "An approach to linguistic instruction based learning and its application to helicopter flight control", Proc. of 5th Int. Fuzzy Systems Association World Congress (IFSA'93), Seoul, Korea, pp.1082-1085, 1993.英語参考
- [13]
- 菅野道夫, "言語による複雑なシステムの制御~半自律無人ヘリコプタ~", in:『ファジィ思考による知的情報処理』 国際ファジィ工学研究所(編), コンピューターエージ社, pp.465-483, 1995.日本語参考
- [16]
- Michio SUGENO, "Navigation of an Unmanned Helicopter", 6th IFSA World Congress, San Paulo, Brasil, 1995. (Plenary Talk)英語
- [22]
- Michio SUGENO, "Recent Advances in Fuzzy Control: Stability Issue and Application to an Unmanned Helicopter", The 3rd World Automation Congress (WAC'98), Anchorage, Alaska, USA, 1998. (Plenary Talk)英語
- [24]
- Michio SUGENO, "Development of an intelligent unmanned helicopter", in: Fuzzy Modeling and Control: Selected Works of M. Sugeno, H. T. Nguyen and N. R. Prasad eds., CRC Press, Inc., pp.13-43, 1999.英語参考参考
- [25]
- 中村心哉、片岡顕二、菅野道夫, "アクティブビジョンとGPSを用いた無人ヘリコプタの自動着陸に関する研究", 日本ロボット学会誌, Vol.18, No.2, pp.252-260, 2000.日本語
- [28]
- Michio SUGENO, "Application to unmanned helicopter navigation, control and human interface", Workshop on Design and Analysis of Fuzzy Control Systems, 2001 American Control Conference (ACC 2001), Arlington, USA, 2001.英語
- [29]
- Michio SUGENO, "Development of an aerial robot toward real applications", in: Advanced Fuzzy-Neural Control 2001: A Proceedings Volume from the IFAC Workshop, Valencia, Spain, pp.111-116, 2001. (Plenary Talk)英語参考
